La bande dessinée qui retrace l'histoire des techniques pour éclairer l'avenir
Le conservatoire qui rebranche sur le NET ce que l’histoire a laissé derrière elle
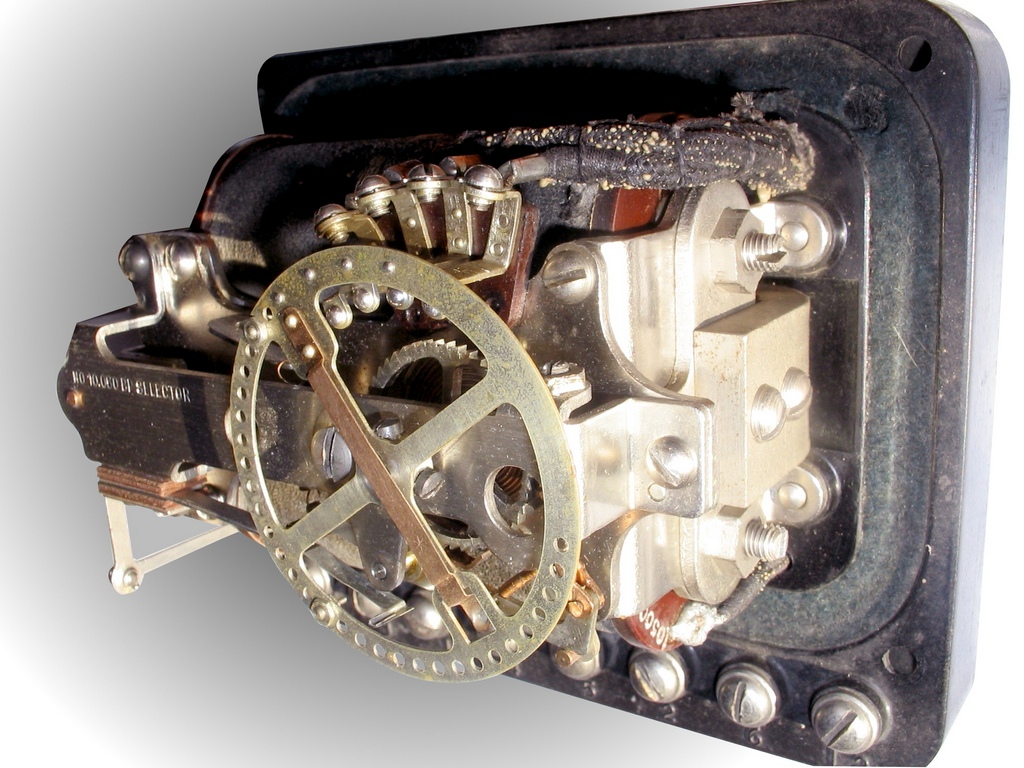
La fonction réalisée ici est un aiguillage : connecter une entrée vers une sortie parmi 4. D’où la dénomination ‘’selector’’.
On part d’un relais à deux bobines qui fait osciller par inversion du sens du courant une palette entre deux positions stables actives. En l’absence de courant, on a une 3ème position stable de repos située entre les deux positions actives et qui remet à zéro le système.
Cette palette se prolonge par un bras terminé par un bec qui s’engrène dans une roue dentée. Cette roue porte un contact porté par une lamelle souple. Les oscillations du bras entraînent la rotation de la roue qui établit successivement le contact vers les 4 contacts fixes. On a réalisé un moteur pas à pas dont l’angle de rotation élémentaire correspond à une dent tout comme un échappement à ancre fait mouvoir l’aiguille des secondes dans une horloge. Le retour à la position de départ se fait grâce à un ressort spiral qui exerce un couple antagoniste avec celui fourni par le moteur.
Les moteurs pas à pas ont été à la base des premiers centraux téléphoniques inventés par Strowger et dits ‘’Rotary’’ dès le début des années 1900. Ce sont les impulsions du cadran qui orientaient le contact vers l’abonné demandé se substituant au travail de la demoiselle du téléphone.
Ce type de moteur pas à pas a été remplacé depuis une vingtaine d’années par les moteurs pas à pas multi-pôles dont la caractéristique la plus intéressante est la vitesse de défilement des pas qui peut dépasser 1000 / seconde. L’application principale des moteurs pas à pas n’est plus les télécommunications mais les imprimantes à impact utilisées par exemple dans les caisses enregistreuses, les scanners, les commandes numériques.